日本で小型電動乗り物を作ろうとすると、中国国内で広く普及している電動バイクや小型電気自動車に使われる
3相ブラシレスモータと速度コントローラを購入して動力システムを作るのがもっとも低コストで成功率が高い方法
かなと思いますが、ワニクマ店長もこの分野に強い興味を持っていますので、どうせなら回路を工夫したり、制御方法を
変えたりして、中国の他社製コントローラよりもっと節電ができる高効率コントローラを作ってみようと研究してみました。
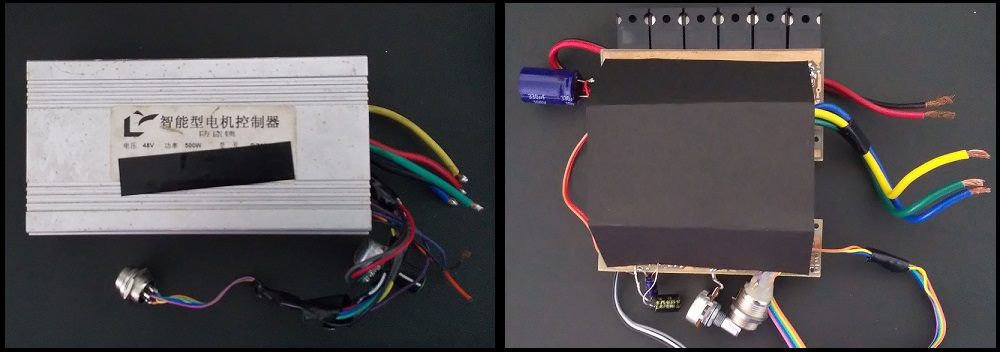 上の写真の左側が他社製の電動バイク用の3相ブラシレスモータコントローラです。右側がワニクマ店長の試作品になります。 今回はワニクマ店長が開発した試作品と他社製のコントローラの性能を比較してみました。 (他社製の中国製コントローラは48V電源が必要ですが、今回は12Vで動作するように制御電源部の抵抗比率を変えています) そして、下の表が比較結果です。 約10%の節電効果が見られました。 |
| モータ回転数 | モータ電流 | 電源電圧 | 電源電流 | 消費電力 | 節電効果 | |
| 他社製品 | 100 rpm | 0.4 Arms | 11.8 V | 0.31 A | 3.66 W | - |
| ワニクマ店長の試作品 | 100 rpm | 0.4 Arms | 11.8 V | 0.27 A | 3.19 W | 87 % |
| モータ回転数 | モータ電流 | 電源電圧 | 電源電流 | 消費電力 | 節電効果 | |
| 他社製品 | 200 rpm | 0.5 Arms | 11.8 V | 0.51 A | 6.02 W | - |
| ワニクマ店長の試作品 | 200 rpm | 0.5 Arms | 11.8 V | 0.47 A | 5.55 W | 92 % |
| モータ回転数 | モータ電流 | 電源電圧 | 電源電流 | 消費電力 | 節電効果 | |
| 他社製品 | 300 rpm | 0.7 Arms | 11.8 V | 0.75 A | 8.85 W | - |
| ワニクマ店長の試作品 | 300 rpm | 0.7 Arms | 11.8 V | 0.7 A | 8.26 W | 93 % |
|
測定条件はモータ回転数100、200、300rpmの3パターンの無負荷です。モータの仕事率は回転数とトルクの掛け算ですが、
ワニクマ店長は回転トルク計測器を持っていないので、トルクの代わりにモータ側の電流で代用しました。
上の表は、例えば100rpmでモータ電流0.4Armsの仕事をモータにさせるのに、他社製は3.66Wの電力を消費することに対して、
ワニクマ店長の試作品は3.19Wで済むことです。
他社製の3.66Wに対して、ワニクマ店長の試作品は他社製の約87%の電力で足りることです。
下のビデオは上記3パターンの実証実験です。 次は多少負荷をかけた状態で比較してみました。ワニクマ店長は高価なモータの負荷吸収用発電機を持っていないので、 モータの軸を無理やり手で掴んで摩擦熱で負荷をかけることにしました。 ちょうど192rpm辺りで良い比較ビデオが取れましたので、192rpm回転数のモータ電流1.3Arms条件で比較したのが下の表です。 |
| モータ回転数 | モータ電流 | 電源電圧 | 電源電流 | 消費電力 | 節電効果 | |
| 他社製品 | 192 rpm | 1.3 Arms | 11.7 V | 1 A | 11.7 W | - |
| ワニクマ店長の試作品 | 192 rpm | 1.3 Arms | 11.7 V | 0.9 A | 10.53 W | 90 % |
|
負荷がかかっても約10%の節電効果が見られます。 下のビデオが負荷をかけた実証実験です。 これだけでは、搬送波(キャリア)周波数の違いで電力損失改善の違いがあるんじゃないの?と思われるかも知れませんが、 確かに搬送波の周波数を下げるとスイッチング損失が減るので、効率改善にはなりますが、ワニクマ店長はそのような単純な仕組みを 利用していません。 下の写真は他社製とパワー半導体のゲート波形を比較した写真ですが、ワニクマ店長の試作品のほうが搬送波の周波数が高く、ゲート波形の時定数も殆ど同じ条件です。 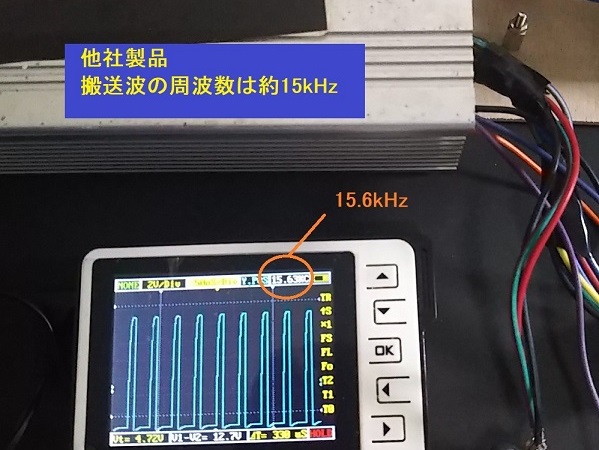 他社製は搬送波が15khz辺りが多いかと思います。 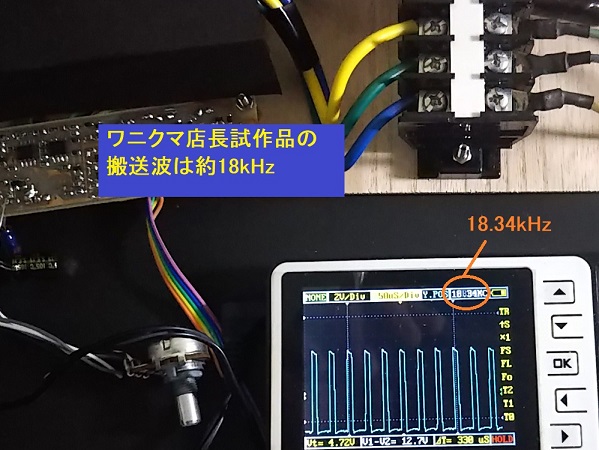 ワニクマ店長の試作品は18kHzのもっとスイッチング損失が高くなる周波数条件の搬送波を採用していますが、その他の回路や制御方法で効率を改善しています。 |
|
戻る |